Symbolic computing for ML#
!wget --no-cache -O init.py -q https://raw.githubusercontent.com/jdariasl/OTBD/main/content/init.py
import init; init.init(force_download=False)
import sys
import sympy as sy
from IPython.display import Image
%load_ext tensorboard
sy.init_printing(use_latex=True)
import tensorflow as tf
tf.__version__
2024-12-10 17:19:50.860339: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations.
To enable the following instructions: AVX2 FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags.
'2.14.0'
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
from scipy.optimize import minimize
%matplotlib inline
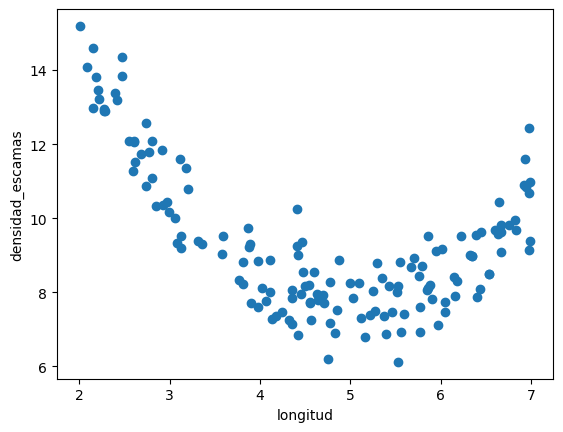
d = pd.read_csv("local/datasets/trilotropicos.csv")
print(d.shape)
plt.scatter(d.longitud, d.densidad_escamas)
plt.xlabel(d.columns[0])
plt.ylabel(d.columns[1]);
(150, 2)
Let’s define a simple loss function#
The gradient of \(\mathcal{L}(\cdot)\) is:
y = d.densidad_escamas.values
X = np.r_[[[1]*len(d), d.longitud.values]].T
def n_cost(t):
return np.mean((X.dot(t)-y)**2)
def n_grad(t):
return 2*X.T.dot(X.dot(t)-y)/len(X)
init_t = np.random.random()*40-5, np.random.random()*20-10
r = minimize(n_cost, init_t, method="BFGS", jac=n_grad)
r
fun: 2.7447662570809355
hess_inv: array([[ 5.49985723, -1.07531773],
[-1.07531773, 0.23126819]])
jac: array([-2.44934669e-08, 2.52831629e-06])
message: 'Optimization terminated successfully.'
nfev: 10
nit: 9
njev: 10
status: 0
success: True
x: array([12.68999516, -0.71805846])
Using sympy computer algebra system (CAS)#
x,y = sy.symbols("x y")
z = x**2 + x*sy.cos(y)
z
we can evaluate the expresion by providing concrete values for the symbolic variables
z.subs({x: 2, y: sy.pi/4})

z.subs({x: 2})

and obtain numerical approximations of these values
sy.N(z.subs({x: 2, y: sy.pi/4}))

a derivative can be seen as a function that inputs and expression and outputs another expression
observe how we compute \(\frac{\partial z}{\partial x}\) and \(\frac{\partial z}{\partial y}\)
z.diff(x)

z.diff(y)

r = z.diff(x).subs({x: 2, y: sy.pi/4})
r, sy.N(r)
r = z.diff(y).subs({x: 2, y: sy.pi/4})
r, sy.N(r)

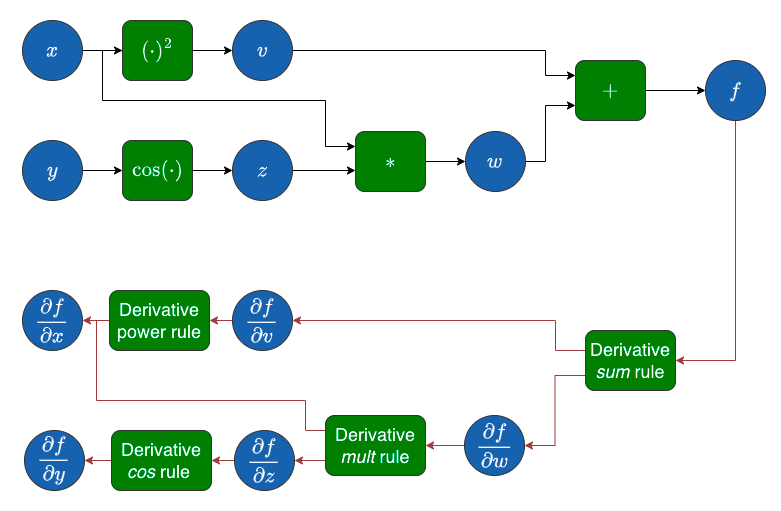
How is this done?
Computational graph#
Image("local/imgs/ComputationalGraph.png")
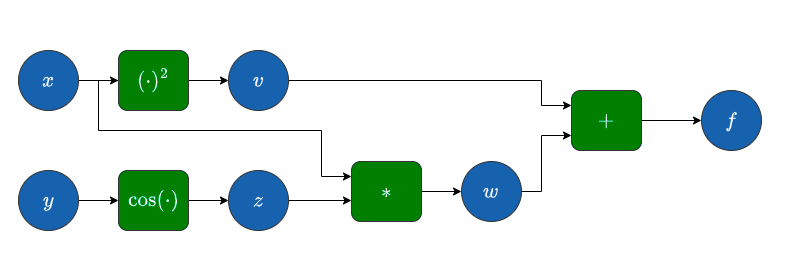
Image("local/imgs/ComputationalGraph2.png")
A symbolic computational package can do a lot of things:#
sy.expand((x+2)**2)

sy.factor( x**2-2*x-8 )

sy.solve( x**2 + 2*x - 8, x)

a = sy.symbols("alpha")
sy.solve( a*x**2 + 2*x - 8, x)

differential equations, solving \(\frac{df}{dt}=f(t)+t\)
t, C1 = sy.symbols("t C1")
f = sy.symbols("f", cls=sy.Function)
dydt = f(t)+t
eq = dydt-sy.diff(f(t),t)
eq
yt = sy.dsolve(eq, f(t))
yt

systems of equations
sy.solve ([x**2+y, 3*y-x])

Sympy to Python and Numpy#
f = (sy.sin(x) + x**2)/2
f
f.subs({x:10})

sy.N(f.subs({x:10}))

f1 = sy.lambdify(x, f)
f1(10)
and a vectorized version
f2 = sy.lambdify(x, f, "numpy")
f2(10)
f2(np.array([10,2,3]))
array([49.72798944, 2.45464871, 4.57056 ])
the lambdified version is faster, and the vectorized one is even faster
%timeit sy.N(f.subs({x:10}))
124 µs ± 3.06 µs per loop (mean ± std. dev. of 7 runs, 10,000 loops each)
%timeit f1(10)
1.28 µs ± 66.1 ns per loop (mean ± std. dev. of 7 runs, 1,000,000 loops each)
%timeit [f1(i) for i in range(1000)]
1.37 ms ± 20.6 µs per loop (mean ± std. dev. of 7 runs, 1,000 loops each)
%timeit f2(np.arange(1000))
15.8 µs ± 471 ns per loop (mean ± std. dev. of 7 runs, 100,000 loops each)
Let’s remember the loss function we defined before:
The gradient of \(\mathcal{L}(\cdot)\) is:
Using sympy to obtain the gradient.#
y = d.densidad_escamas.values
X = np.r_[[[1]*len(d), d.longitud.values]].T
w0,w1 = sy.symbols("w_0 w_1")
w0,w1

we first obtain the cost expression for a few summation terms, so that we can print it out and understand it
L = 0
for i in range(10):
L += (X[i,0]*w0+X[i,1]*w1-y[i])**2
L = L/len(X)
L
we can now simplify the expression, using sympy mechanics
L = L.simplify()
L

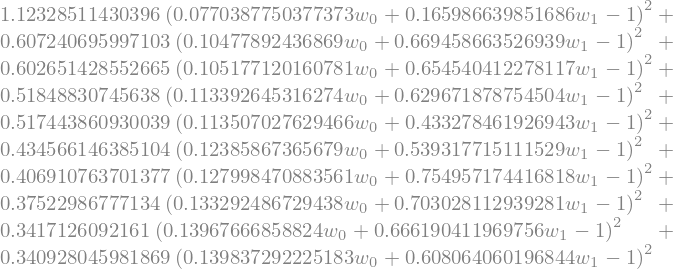
we now build the full expression
def build_regression_cost_expression(X,y):
expr_cost = 0
for i in range(len(X)):
expr_cost += (X[i,0]*w0+X[i,1]*w1-y[i])**2/len(X)
expr_cost = expr_cost.simplify()
return expr_cost
y = d.densidad_escamas.values
X = np.r_[[[1]*len(d), d.longitud.values]].T
expr_cost = build_regression_cost_expression(X,y)
expr_cost

obtain derivatives symbolically
expr_dw0 = expr_cost.diff(w0)
expr_dw1 = expr_cost.diff(w1)
expr_dw0, expr_dw1

and obtain regular Python so that we can use them in optimization
s_cost = sy.lambdify([[w0,w1]], expr_cost, "numpy")
d0 = sy.lambdify([[w0,w1]], expr_dw0, "numpy")
d1 = sy.lambdify([[w0,w1]], expr_dw1, "numpy")
s_grad = lambda x: np.array([d0(x), d1(x)])
and now we can minimize
r = minimize(s_cost, [0,0], jac=s_grad, method="BFGS")
r
fun: 2.7447662570799594
hess_inv: array([[ 5.57425906, -1.09086733],
[-1.09086733, 0.23434848]])
jac: array([-1.73778293e-07, -9.26928138e-07])
message: 'Optimization terminated successfully.'
nfev: 10
nit: 9
njev: 10
status: 0
success: True
x: array([12.6899981, -0.7180591])
observe that hand derived functions and the ones obtained by sympy evaluate to the same values
w0 = np.random.random()*5+10
w1 = np.random.random()*4-3
w = np.r_[w0,w1]
print ("theta:",w)
print ("cost analytic:", n_cost(w))
print ("cost symbolic:", s_cost(w))
print ("gradient analytic:", n_grad(w))
print ("gradient symbolic:", s_grad(w))
theta: [10.98668483 0.37723461]
cost analytic: 16.790694513357096
cost symbolic: 16.790694513357067
gradient analytic: [ 6.77949907 36.19071996]
gradient symbolic: [ 6.77949907 36.19071996]
Expression swell
Multidimensional vector-valued functions require additional contructs beyond algebraic expressions:
Gradient
Jacobian
Hessian
Jacobian vector products (jvp): \(J_g(\theta){\bf v}\)
Vector jacobian products (vjp): \({\bf u}^\top J_g(\theta)\)
The partial derivatives are mainly built on top of jvp and vjp operators. Note that \(\frac{\partial g}{\partial \theta_i}\) is just the \(i\)-column vector of the Jacobian, or the jvp when the vector \({\bf v} = [0,\cdots,i,\cdots,0]\) where \(i=1\), or, even more efficiently using vjp.